AutoPacking
1 介绍
实现周期边界,二维任意多边形(凹&凸)和二维圆弧段边界,三维任意多面体(凹&凸的三角片)边界下的填充结构生成。可实现二维圆盘,椭圆,矩形,多边形,圆角多边形等,三维球,椭球,圆柱,球柱,基本柏拉图实体等的填充结构的生成。生成算法包括松弛算法,MonteCarlo算法,DEM算法,RSA算法等。
-
目前开放的部分包括:
-
松弛算法(球/圆盘)
- 2d/3d周期边界填充
- 2d/3d任意多边形/多面体固定边界的填充
- 3d任意STL三角片边界的填充
- 2d任意圆弧段边界填充算法
-
松弛算法(球/圆盘)
(如需其他算法或者颗粒外形的计算,请联系我们 lsx@pku.edu.cn)
2 使用说明
目前提供三种方式使用该程序,分别是:
- 提供 c++ 的静态链接库,供 c++ 编程使用
- 提供编译好的exe程序,用户编写input.txt输入文件,使用该程序
- 提供基于AutoCAD的插件文件,在CAD中通过相关命令直接使用该程序计算
对于前两种方法,非周期边界还需要准备边界信息文件
对于第三种方法,可直接在通过CAD作图描述边界信息
2.1 边界信息文件说明
-
二维边界
对于二维边界信息,目前仅仅接受Autocad中pline画出的封闭多边形&圆弧段边界,在cad中画好需要填充的封闭曲线边界后,采用dxfout命令输出边界文件供该程序读取。
eg: InputFile中的circle.dxf 和 squre10.dxf -
三维边界
对于三维边界,目前仅仅接受Autocad中画出的三维实体,采用stlout命令输出的格式文件作为该程序的输入文件。
eg: InputFile中的box10.stl 和 cylinder.stl 和 sphere8.stl等文件
2.2 c++编程说明
前往AutoPacking网站下载该静态链接库以及相关头文件,在本地解压后,文件目录如下:
AutoPacking.lib
algebra.h
packing.h
packing_monte_carlo.h
packing_relaxation.h
particle.h
particle_circle.h
particle_combined_circle.h
particle_combined_sphere.h
particle_sphere.h
README.md
通过引用所需头文件来实现相关计算
目前已已经开放的的功能:
-
圆盘/球形颗粒
-
松弛算法
- 2d/3d周期边界填充算法
- 2d/3d固定凸边界填充算法
- 3d固定凹边界填充算法
- 2d多段线任意边界填充算法
-
蒙特卡洛算法
- 2d/3d周期边界填充算法
-
松弛算法
-
组合圆盘/球
-
松弛算法
- 2d/3d周期边界填充算法
-
蒙特卡洛算法
- 2d/3d周期边界填充算法
-
松弛算法
系统要求:windows10 + visual studio 2019
规模限制在10000个颗粒以内,如需更大规模的计算,请联系我们 lsx@pku.edu.cn
2.2.1 软件架构
基类:
particle.h ///< 颗粒基类
packing.h ///< 填充算法基类
颗粒的派生类:
particle_circle.h ///< 圆盘颗粒
particle_combined_circle.h ///< 组合圆盘颗粒
particle_combined_sphere.h ///< 组合球颗粒
particle_sphere.h ///< 球形颗粒
算法类:
packing_monte_carlo.h ///< 蒙特卡洛算法
packing_relaxation.h ///< 填充算法
2.2.2 静态链接库配置教程
windows下配置
- 在www.packingtech.cn上下载压缩包并本地解压
- 解决方案配置:Relase
- 解决方案平台:×64
- VS->项目->属性-> vc++ 目录->外部包含目录:添加上述目录地址
-
VS->项目->属性-> vc++ 目录->库目录:添加上述目录地址
目前仅提供vs2019版本和vs2022版本的静态编译库
2.2.3 c++编程说明
算法流程分为以下几个模块
1、定义算法
格式:算法类名<维度> 算法(参数);
eg:
RelaxationPacking<2> pac(1.5, 1, 1, 0.02, 250);///< 二维松弛算法的定义
RelaxationPacking<3> pac(1.2, 1, 1, 0.02, 250);///< 三维松弛算法
MonteCarloPacking<2> pac(1);///< 二维MC算法的定义
MonteCarloPacking<3> pac(1);///< 三维MC算法的定义
Packing<2> pac; ///< 定义一个无算法的颗粒容器用于存储2d颗粒
- 其中算法参数为可选项,如无则使用默认参数
2、边界定义
周期边界的定义:
Matrix<2, 2> lattice = 10.0 * Matrix<2, 2>::UNIT(); ///< 定义周期边界矩阵
pac.set_boundary(lattice); ///< 将矩阵添加至周期边界
固定边界的定义:
pac.set_boundary("concave_box10.stl");///< 固定边界
- 边界文件的说明同上述文件输入使用该程序
3、设定背景网格类型(此为可选项)
pac.set_cgrid_ratio(2.0);
- 该语句将设定背景网格为Cgrid网格,该网格适用于大小多元填充的计算,相比于NBS背景网格,粒径差别越大,带来的性能提升越大。但是一元情况性能不如NBS背景网格。
4、颗粒生成
定义颗粒:
Particle<2>* circle1 = new CircleParticle(1);定义半径为1的圆盘颗粒
Particle<3>* sphere1 = new SphereParticle(1);定义半径为1的球形颗粒
-
<>中的数字表示维度,仅可为2/3,并且圆盘只能是2d颗粒,球只能是3d颗粒。
将颗粒添加至packing
pac.push(circle1, 500); ///< 将500个圆盘添加至packing
- 该函数可多次调用以实现多元packing的计算
- 该函数的参数500可省略,则代表仅仅添加一个颗粒
- 该函数在添加多个颗粒时,每个颗粒的坐标为边界内的随机坐标,颗粒方向为随机方向
5、算法初始化
pac.Initialize(); ///< 算法的初始化
- 对于松弛算法,则是初始化颗粒的粒径大小,使之满足初始填充率的设定值
- 对于MC算法,初始化则是初始化颗粒坐标,使颗粒间无重叠,初始化周期边界大小,使之满足初始低密度填充(0.2)
6、开始计算
pac.Run(true); ///< 开始松弛算法或者MC算法的计算,在屏幕上输出计算过程,此时true可省略
pac.Run(false);///< 开始松弛算法或者MC算法的计算,不在屏幕上输出计算过程
7、结果输出
pac.ScrPacking("attach_inf",true); ///< 输出SCR画图文件
pac.Output("attach_inf",true); ///< 生成xyz格式存储文件
- 其中attach_inf为附加输出的信息,若其后参数为true,则将该信息添加至标准文件名格式之前,若无该参数或者为false,则将该内容添加至输出文件的最后,以文本输出。
- 这两个参数均省略时,则仅仅以标准格式输出文件
2.2.4 2d松弛算法程序示例
///< 二维圆盘松弛程序
#include"particle_circle.h"
#include"packing_relaxation.h"
#pragma comment(lib,"AutoPacking.lib")
int main(void) {
Matrix<2, 2> lattice = 10.0 * Matrix<2, 2>::UNIT();///< 定义周期边界的大小
Particle<2>* circle1 = new CircleParticle(1.0); ///< 定义半径为1.0圆盘
RelaxationPacking<2> pac(1.5, 1, 1, 0.02, 250); ///< 二维松弛算法的定
pac.set_boundary(lattice); ///< 周期边界
//pac.set_boundary("squre10.dxf");///< 固定边界
//pac.set_cgrid_ratio(2.0); ///< 设置Cgrid计算网格
pac.push(circle1, 500); ///< 添加颗粒1至计算程序
pac.Initialize(); ///< 松弛计算初始化
pac.Run(); ///< 松弛计算
pac.ScrPacking(); ///< 输出SCR画图文件
pac.Output(); ///< 生成xyz格式存储文件
return 0;
}
2.3 可执行文件使用说明
前往AutoPacking网站下载该可执行文件,后缀名为 .exe,新建InputFile作为存放输入文件的文件夹,编写input.txt作为参数输入文件,对于非周期边界,还需要边界描述文件,三维情况下为STL文件,二维情况下为DXF文件。
文件目录如下:
InputFile
input.txt
boundary.dxf
boundary.stl
AutoPacking.exe
运行exe文件即可进行计算得到结果
2.3.1 输入文件说明
填充信息输入文件为txt文件
-
第一行为需要计算的packing数量
对于每一个packing的信息:
- 第一行为packing的维度信息,只允许是2 / 3
- 第二行为填充算法信息:算法名+算法参数
- 松弛算法算法名:relaxation
- 参数:初始填充率 平动松弛系数 转动松弛系数 颗粒缩小系数 松弛周期
- 蒙特卡洛算法名:MonteCarlo
- 参数:压缩速率(每次边界变形每个颗粒的平均移动次数)
- 第三行为边界信息: 边界类型+边界信息
- 边界类型:只允许是 fixed / period
- 固定边界边界信息:文件名,二维填充是 dxf 文件;三维填充是 stl 文件
- 周期边界信息:
- 二维为两个数字,以空格隔开,分别代表周期长方形的长与高
- 三维为三个数字,以空格隔开,分别代表周期长方体的长与宽与高
- 第四行是packing中的组分数量 n ,有多少组分即为多少
- 接下来 n 行是每种组分的信息:包括形状名字,形状参数,该类颗粒数量
- 目前形状名字仅仅包含二维的circle 和三维的sphere
- 对于circle和sphere的形状参数仅仅只有半径R
- 最后一行为分隔符,不具有任何意义,任何连续字符均可
- 示例文件 example_check_algorithm.txt
- 该文件包含13个packing,包括松弛算法固定与周期边界,MC算法固定与周期边界的一元/多元填充算例
- 颗粒类型为圆盘/球
下面给出一个松弛算法球填充的粒子:
1 #packing的数量
3 #维度
relaxation 1.5 1 1 0.005 200 #算法名字和算法参数
fixed box10.stl #边界条件
2 #组分数
sphere 1 200 #组分1的信息
sphere 1.1 300 #组分2的信息
**************************** #分隔符
2.4 通过AutoCAD命令使用说明
前往AutoPacking网站下载ObjectARX插件,在AutoCAD中加载该插件后,即可使用
** 张世旋完成后编写该部分 **
2.5 输出文件说明
- 对于每一个packing,均会输出两个文件,分为为基于AutoCAD的scr文件和基于OVITO的xyz格式文件。
2.5.1 文件命名
-
颗粒类型_颗粒数_填充率_填充算法_时间戳.xyz
-
单分散 Sphere(1)[100%]_100_0.641232_MonteCarlo_10011200.xyz
-
形状多分散 Sphere(1)[40%]-Cube(2)[60%]_100_0.765432_Relaxation_10011200.xyz
-
大小多分散 Sphere(1)[40%]-Sphere(1.1)[60%]_100_0.835644_AthermalQuasistatic_10011200.xyz
2.5.2 scr格式说明
- scr文件为AutoCAD中的画图文件,直接用AutoCAD打开即可得到packing图像
2.5.3 xyz格式说明
-
第一行为颗粒数。
-
第二行为周期边界、晶胞中心(固定为原点)、每一列值的含义(用于ovito自动读取)。
-
第三行开始,每一行表示一个颗粒的信息。
- 其中第一列为颗粒类型,用来区分不同形状、不同大小的颗粒;
- 后续一列为同形状颗粒类型,用来区分相同形状、不同大小的颗粒;
- 后续一列为形状名称,取值范围为
Shape中的值; - 后续三列列为颗粒坐标,分别为x、y、z分量;
- 后续四列为颗粒方向,以四元数表示,分别为x、y、z、w分量,其中对于圆或球该参数仅作占位;
-
后续三列为形状轴比,分别为x、y、z分量,其中:
- 对于圆、球、正方形和立方体,三分量必须相等;
- 对于多边形、多面体、组合圆(球),该参数仅作占位;
- 对于圆多边形和球多面体,表示圆角半径;
- 对于圆(球)柱,x分量表示底面圆半径,z分量表示高度,y分量仅作占位;
-
最后一列为额外参数,其中第一位表示参数个数,其中:
- 对于超椭圆(球),表示超椭圆(球)的形状因子;
- 对于(圆)多边形、(球)多面体,表示局部顶点列表;
- 对于组合圆(球),表示各圆(球)的半径和局部坐标;
-
整体格式
N
Lattice="R1x R1y R1z R2x R2y R2z R3x R3y R3z" Origin="0.0 0.0 0.0" Properties=species:S:1:local_species:S:1:shape_type:S:1:pos:R:3:orientation:R:4:aspherical_shape:R:3
0 0 Circle Px Py Pz # # # # R R R
1 0 Ellipse Px Py Pz Qx Qy Qz Qw Ax Ay Az
2 0 SuperEllipse Px Py Pz Qx Qy Qz Qw Ax Ay Az 1 p
3 0 Square Px Py Pz Qx Qy Qz Qw L L L
4 0 Rectangle Px Py Pz Qx Qy Qz Qw Ax Ay Az
5 0 Polygon Px Py Pz Qx Qy Qz Qw # # # 2*n x1 y1 ... xn yn
6 0 CircularPolygon Px Py Pz Qx Qy Qz Qw R R R 2*n x1 y1 ... xn yn
7 0 CombinedCircle Px Py Pz Qx Qy Qz Qw # # # 3*n r1 x1 y1 ... rn xn yn
8 0 Sphere Px Py Pz # # # # R R R
9 0 Ellipsoid Px Py Pz Qx Qy Qz Qw Ax Ay Az
10 0 SuperEllipsoid Px Py Pz Qx Qy Qz Qw Ax Ay Az 2 p1 p2
11 0 Cube Px Py Pz Qx Qy Qz Qw L L L
12 0 Cuboid Px Py Pz Qx Qy Qz Qw Ax Ay Az
13 0 Polyhedron Px Py Pz Qx Qy Qz Qw # # # 3*n x1 y1 z1 ... xn yn zn
14 0 SpheroPolyhedron Px Py Pz Qx Qy Qz Qw R R R 3*n x1 y1 z1 ... xn yn zn
15 0 CombinedSphere Px Py Pz Qx Qy Qz Qw # # # 4*n r1 x1 y1 z1 ... rn xn yn zn
16 0 Cylinder Px Py Pz Qx Qy Qz Qw Ax # Az
17 0 SpheroCylinder Px Py Pz Qx Qy Qz Qw Ax # Az
...
其中,#表示占位符,可置零或任意值,但不可空缺。
- 单分散格式
N
Lattice="R1x R1y R1z R2x R2y R2z R3x R3y R3z" Origin="0.0 0.0 0.0" Properties=species:S:1:local_species:S:1:shape_type:S:1:pos:R:3:orientation:R:4:aspherical_shape:R:3
0 0 Circle Px Py Pz # # # # R R R
0 0 Circle Px Py Pz # # # # R R R
0 0 Circle Px Py Pz # # # # R R R
0 0 Circle Px Py Pz # # # # R R R
0 0 Circle Px Py Pz # # # # R R R
...
- 形状多分散格式
N
Lattice="R1x R1y R1z R2x R2y R2z R3x R3y R3z" Origin="0.0 0.0 0.0" Properties=species:S:1:local_species:S:1:shape_type:S:1:pos:R:3:orientation:R:4:aspherical_shape:R:3
0 0 Circle Px Py Pz # # # # R R R
1 0 Ellipse Px Py Pz Qx Qy Qz Qw Ax Ay Az
2 0 Square Px Py Pz Qx Qy Qz Qw L L L
3 0 Rectangle Px Py Pz Qx Qy Qz Qw Ax Ay Az
4 0 CircularPolygon Px Py Pz Qx Qy Qz Qw R R R 2*n x1 y1 ... xn yn
...
- 大小多分散格式
N
Lattice="R1x R1y R1z R2x R2y R2z R3x R3y R3z" Origin="0.0 0.0 0.0" Properties=species:S:1:local_species:S:1:shape_type:S:1:pos:R:3:orientation:R:4:aspherical_shape:R:3
0 0 Circle Px Py Pz # # # # R0 R0 R0
1 1 Circle Px Py Pz # # # # R1 R1 R1
2 2 Circle Px Py Pz # # # # R2 R2 R2
3 3 Circle Px Py Pz # # # # R3 R3 R3
4 4 Circle Px Py Pz # # # # R4 R4 R4
...
- 形状大小多分散格式
N
Lattice="R1x R1y R1z R2x R2y R2z R3x R3y R3z" Origin="0.0 0.0 0.0" Properties=species:S:1:local_species:S:1:shape_type:S:1:pos:R:3:orientation:R:4:aspherical_shape:R:3
0 0 Circle Px Py Pz # # # # R0 R0 R0
1 1 Circle Px Py Pz # # # # R1 R1 R1
2 0 Square Px Py Pz Qx Qy Qz Qw L0 L0 L0
3 1 Square Px Py Pz Qx Qy Qz Qw L1 L1 L1
4 0 CircularPolygon Px Py Pz Qx Qy Qz Qw R R R 2*n x1 y1 ... xn yn
...
2.5.4 文件注释
除颗粒主要信息外,还需包含
- Periodic: true
- Date: 2021-10-01 12:00:00
- Algorithm: MonteCarlo
- Competation time: 2h34m34s
3 附录
亦可基于该上述提供的静态编译库自行开发相关填充算法,此部分为对于静态库中包含的基类、变量、函数的详细说明
3.1基类说明
particle.hpp和packing.hpp为两个基类
定义新形状需要继承particle.hpp
定义新算法需要继承packing.hpp
- 定义算法的过程中需要考虑对任意形状与组分的通用性
3.2 particle.hpp
目前而言不需要颗粒的材料信息以及运动学信息,因此暂时未定义。
定义新形状必须继承particle.hpp。
3.2.1 数据
protected:
Shape shape_type_; ///< 形状
Position position_; ///< 坐标
Orientation orientation_; ///< 方向
int id_; ///< 颗粒的id号,与颗粒下标对应
double volume_; ///< 体积
double inner_radius_; ///< 内切球半径
double outer_radius_; ///< 外接球半径
Vector<D> charactor_length_; ///<x,y,z方向的颗粒特征长度
基类仅仅包含颗粒的 形状名称,颗粒位置,颗粒方向,颗粒id,内外切圆/球半径,颗粒体积,每个维度上的颗粒特征长度 等基础颗粒信息。
3.2.2 数据操作函数
public:
Shape get_shape_type() const ; ///< 读取形状
const Position& get_position() const ; ///< 读取坐标
const Orientation& get_orientation() const ///< 读取方向
int get_id() const ; ///<读取颗粒的id
double get_volume() const ; ///< 读取体积
double get_inner_radius() const ; ///< 读取内切球半径
double get_outer_radius() const ; ///< 读取外接球半径
Vector<D> get_charactor_length() const ; ///<读取颗粒的三个方向的特征长度
private:
friend class Packing<D>;
void set_id(int id) ; ///<读取颗粒的id
void set_charactor_length(Vector<D> len) ; ///<设置颗粒的特征长度
void set_position(const Position& position); ///< 设置坐标
void set_orientation(const Orientation& orientation); ///< 设置方向
void adj_position(const Position& delta_position); ///< 调整坐标
void adj_orientation(const Orientation& delta_orientation); ///< 调整方向
说明:
颗粒数据的获取在任何时候均可获取,但是颗粒数据的更改和设置,仅仅可以在Packing类中进行,因为参数改变则需要网格更新同步进行,因此不允许用户调用particle类中的函数设置,仅仅可以调用packing类中的函数更改。
3.2.3 辅助计算函数
virtual void set_particle_scale(double scale) = 0;
- 将颗粒等比的放大或者缩小,比例因子为scale。
- 由于不同的形状放缩方法与参数可能不同,因此基类中不提供该函数的定义。
- 新定义颗粒必须提供该函数的定义。
virtual std::vector<double> get_shape_parameters()const = 0;
- 获取除基类中的颗粒参数意外的参数,由于参数个数不定,因此用数组表示。
- 对于圆盘或者球,该参数代表半径。对于椭球,代表每个半长轴的长度。对于更加复杂的形状,该数组每个参数的意义,可由用户自行定义。
- 由于不同的颗粒形状参数不同,因此基类中不提供该函数的定义。
- 新定义颗粒必须提供该函数的定义。
virtual Particle<D>* NewParticle(void) = 0;
- 生成当前颗粒的一个副本,为其开辟内存空间,用于颗粒体系的生成。
- 返回生成的颗粒的指针。
- 由于不同的颗粒生成方式不同,因此基类中不提供该函数的定义。
- 新定义颗粒必须提供该函数的定义。
virtual bool operator ==(const Particle<DIM>& p) const = 0;
- 定义重载等用于判断两个同名颗粒是否相等
- 比如都是Circle,但是半径不同的两个颗粒应该不相等。
- 新定义颗粒必须提供该函数的定义。
3.2.4 求交函数
- 相交信息的传递
template <int DIM>
struct Collision {
double depth; ///< 相交深度
Vector<DIM> point; ///< 相交点
Vector<DIM> normal; ///< 相交法向
void Print(void); ///< 屏幕输出交点信息
};
- 边界数据类型定义如下:
template <int DIM>
struct StlElement {
Vector<DIM> point[DIM]; ///< DIM==3:三角片的三个顶点,DIM=2:线段的两个顶点
Vector<DIM> normal; ///< 边界三角片或者线段的外法向
void Print(void); ///< 打印边界信息
double DistanceToPoint(Vector<DIM> center) const; ///< 计算边界与center 的距离
};
- 定义颗粒与边界的求交.
virtual void Overlap(const StlElement<DIM>& stltri,Collision<DIM>& col) const = 0;
- 颗粒与颗粒求交的中转函数
- 由于是全部使用基类指针表达颗粒,因此该求交函数的作用是通过this指针识别当前颗粒类型后做中转调度使用
- lattice为周期边界下的边界大小,由于我们搜索的都是临近颗粒,当两个颗粒在某一维度上相距过远时(大于两个颗粒的外接球半径之和即可),表明为周期边界,因此在该维度上做周期平移。
- 固定边界的计算该参数可以省略
virtual void Overlap(const Particle<DIM>* that, Collision<DIM>& col,Matrix<DIM, DIM> lattice = 99999 * Matrix<DIM, DIM>::UNIT())const = 0;
- 与球/圆形颗粒的求交
- lattice为周期边界下的边界大小,由于我们搜索的都是临近颗粒,当两个颗粒在某一维度上相距过远时(大于两个颗粒的外接球半径之和即可),表明为周期边界,因此在该维度上做周期平移。
- 固定边界的计算该参数可以省略
virtual void Overlap(const SphereParticle* that, Collision<DIM>& col, Matrix<DIM, DIM> lattice = 99999 * Matrix<DIM, DIM>::UNIT()) const ; ///定义颗粒与自身的求交
virtual void Overlap(const CircleParticle* that, Collision<DIM>& col, Matrix<DIM, DIM> lattice = 99999 * Matrix<DIM, DIM>::UNIT()) const ; ///定义颗粒与自身的求交
3.2.5 画图函数
public:
virtual void Draw() const; ///< 自定义绘制图形
virtual void Print() const; ///< 屏幕打印输出
virtual void Input(std::string& line); ///< 标准格式输入行
virtual std::string Output() const; ///< 标准格式输出行
virtual std::string ScrParticle() const; ///< scr式输出行
3.3 packing.hpp
- 该类为一个容器,用于存储packing中的颗粒,同时提供自动的背景网格的更新,用于颗粒与颗粒之间的临近检索和颗粒与固定边界之间的临近检索,将全局搜素问题转化为局部搜素问题。
- 该类中包含两套背景网格算法:NBS算法 Cgrid算法
- NBS算法用于一元填充计算,Cgrid算法适用于多元填充计算。
3.3.1 背景网格介绍
-
NBS背景网格算法
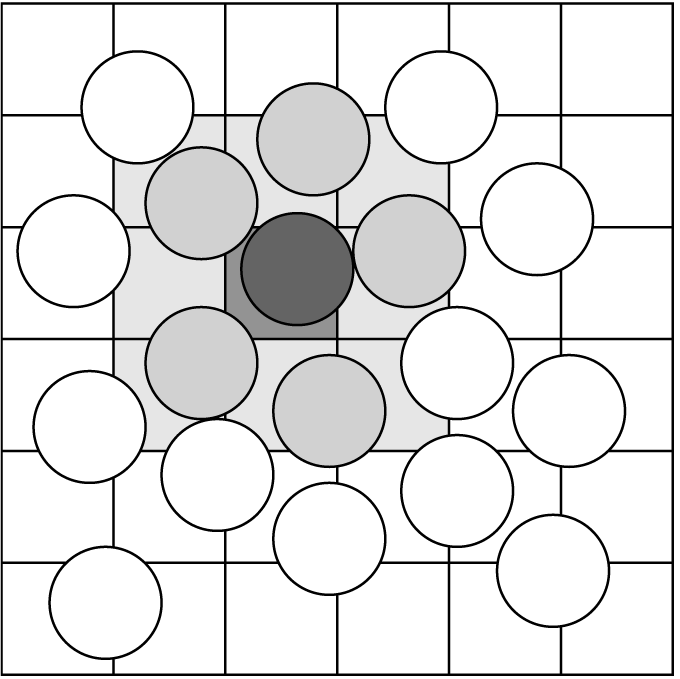
如图3.1所示,在2/3维情况下,建立一套固定于坐标系的正方形/立方体背景网格,网格尺寸和颗粒的外接圆/外接球的直径相当。这样可既以保证每一个颗粒最多可以横跨4/8个网格(颗粒质心在网格节点上),又可以保证每个网格内的颗粒尽量最少。每个颗粒所属的网格为其质心所在的网格。
首先,查找与一个目标颗粒接触的所有颗粒,不需要与系统内所有颗粒进行精确的接触判断,只需要将目标颗粒所在的网格内,以及周围的8/26个网格内的颗粒即可。如图1所示。然后以所有的颗粒作为目标颗粒进行上述操作,就可以找到整个系统内所有的接触。
-
优点:
- 1)思路简单,便于操作。
- 2)可以适用于任何维度(1维,2维,3维,甚至更高阶的抽象维数)。
-
缺点:
-
1)有大量的重复判断,比如A颗粒和B颗粒的接触,以A作为目标颗粒时判断了一次,以B作为目标颗粒又判断了一次。
- 求交时可认为减半处理,比如计算颗粒编号为id的颗粒求交时,仅仅计算其与编号大于id的颗粒相交情况,将结果加至两个颗粒即可。
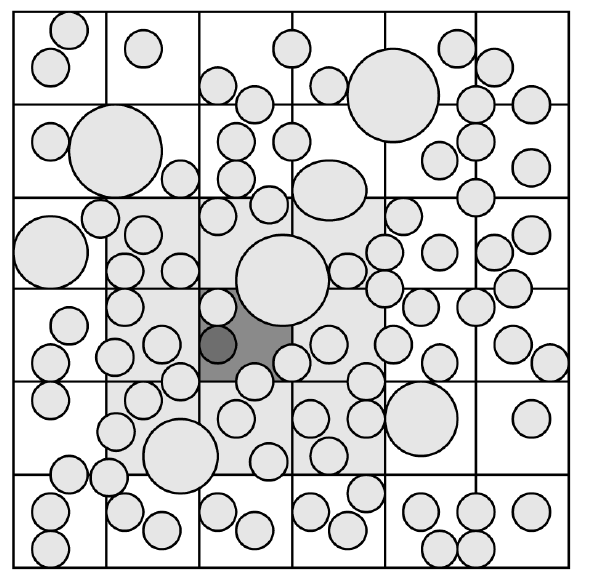
- 2)对于多相系统,颗粒的形状和大小不一致,尤其是大小差别很大的系统,难以确定一个较好的网格的尺寸。为了保证算法的准确性(只与周围8/26个网格内的颗粒进行判断),网格尺寸必须与最大颗粒的尺寸相当。当颗粒大小差别很大时(如下图),此方法效率很低。
-
1)有大量的重复判断,比如A颗粒和B颗粒的接触,以A作为目标颗粒时判断了一次,以B作为目标颗粒又判断了一次。
-
优点:
-
Cgrid背景网格介绍
CGRID算法是基于NBS算法避免重复计算的思路,又考虑颗粒大小不一致的问题的一种算法。具体思路如下:
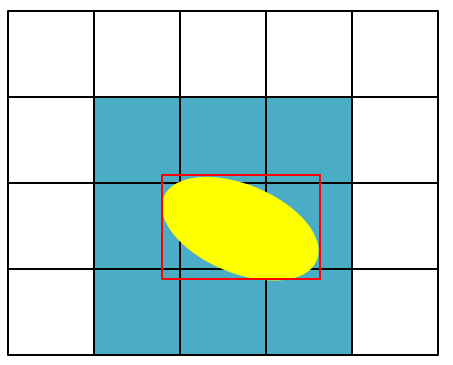
CGRID算法中背景网格大小与颗粒尺寸无关,无论多大的背景网格均可保证搜索算法的正确性。在确定颗粒所属的背景网格块时,首先确定颗粒在各个维度上的上下边界,这会在二维时形成一个矩形,在三维形时成一个长方形,与这一包裹颗粒的形状相交的网格都包含了这个颗粒。二维下如下图所示。这样就可以适用于多相系统。
-
优点:
- 1)有效的减少了重复判断的次数。缩小了判断的范围。
- 2)可以适用于任何维度(1维,2维,3维,甚至更高阶的抽象维数)。
- 3)可适用于多相系统,可解决颗粒的形状和大小不一致的问题。
-
缺点:
- 1)算法复杂,算法实现比较复杂。
- 2)网格尺寸可调,不同网格尺寸对效率有很大的影响。最优背景网格尺寸没有确定的取法,需要试算。
-
优点:
3.3.2 packing类中的数据与操作
packing类中包含颗粒数据(对外可见),边界数据(对外可见),填充数据(对外可见)网格数据(对外不可见)。
3.2.2.1 对外可见数据
private:
std::vector<Particle<DIM>*> p_particles_; ///< 颗粒数组
int num_particles_; ///< 记录颗粒的数量
double particles_volume_; ///< 颗粒的总体积
double max_character_len_; ///< 最大的颗粒外切圆半径
double ave_character_len_; ///< 平均颗粒外切圆半径
std::vector<ShapeNum> packing_information_; ///< 记录颗粒的形状以及数量
private:
Matrix<DIM, DIM> lattice_; ///< 晶格矩阵
std::vector<StlElement<DIM>> boundary_; ///< 边界stl三角片信息
double grids_volume_; ///< 填充空间的总体积
int is_period_; ///< 记录边界是否是周期边界
double Cgrid_ratio_; ///< Cgrid网格网格大小比例因子,默认2.0,平均特征长度的2倍
std::string boundary_file_name_; ///< 边界信息文件名
std::string packing_method_name_; ///<记录填充方法的名字
bool is_print_; ///< 是都输出中间计算信息到屏幕
- 以上数据均可以通过函数访问
public:
const std::vector<Particle<DIM>*>& get_p_particles() const; ///< 获取颗粒列表
Particle<DIM>*& operator[](int i); ///< 获取单个颗粒
const std::vector<StlElement<DIM>>& get_boundary() const; ///< 获取边界列表
const StlElement<DIM>& get_boundary(int id) const; ///< 获取一条边界
const std::string get_boundary_file_name() const; ///< 获取边界文件名
const double& get_max_character_len() const { return max_character_len_; } ///< 获取packing中的最大特征长度
const double& get_ave_character_len() const { return ave_character_len_; } ///< 获取packing中的平均特征长度
const std::vector<ShapeNum>& get_packing_information() const ; ///< 获取填充信息数据
const std::string get_packing_method_name() const; ///< 获取填充方法的名字
const bool get_is_print() { return is_print_; }; ///< 获得是否输出到屏幕
const Matrix<DIM, DIM> get_lattice() const ; ///< 获取模拟域大小,对周期边界即为边界大小
const bool get_is_period() const; ///< 判断是否是周期边界
const int get_num_particles() const ; ///< 获取填充中颗粒数
const double get_grids_volume() const ; ///< 获取填充中颗粒数量
const double get_particles_volume() const ;///< 获取颗粒的总体积
- 部分数据可以允许用户通过以下函数设置
public:
void set_boundary(std::string filename); ///< 设置固定边界,该函数只允许调用一次
void set_boundary(Matrix<DIM, DIM> lattice); ///< 设置周期边界,该函数只允许调用一次
void set_lattice(Matrix<DIM, DIM>& lattice); ///< 设置周期边界的大小
void set_packing_method_name(std::string method); ///< 设置方法名
void set_cgrid_ratio(double ratio); ///< 设置cgrid的网格大小,如无该函数,则默认采用NBS网格
void set_no_print() { is_print_ = false; }; ///< 设置不输出到屏幕
3.2.2.2 对外不可见数据与不可见操作(背景网格相关数据)
private:
int grid_num_[DIM]; ///< 每个维度上的网格数量
double grid_len_[DIM]; ///< 每个维度上的网格长度
int grid_size_; ///< 网格总数量
std::vector<std::array<int, DIM>> grid_pos_; ///< 储存网格坐标变换(1d->3d)
bool is_cgrid; ///< 记录当前背景网格是什么网格,true:Cgrid网格,false:NBS网格
std::vector<Grid> grids_; ///< 记录网格中的颗粒以及网格中的边界,以及在NBS中的邻居网格
std::vector<int> NBS_cell_id_; ///< 记录颗粒所隶属的网格(仅仅在NBS中使用)
std::vector<std::vector<int>> Cgrid_cells_id_; ///< 颗粒所隶属的网格组(仅仅在Cgrid中使用)
其中Grid数据结构如下:
struct Grid {
std::list<int> particle_indices; ///< 颗粒数组
std::vector<int> boundary_indices; ///< 与该网格中的颗粒可能相交的边界id
std::vector<int> neighbor_indices; ///< 邻居列表记录网格中的颗粒以及周围的8/26个网格的编号,仅仅在NBS中使用
};
以上数据仅仅在该类内部可见,也仅仅在该类内部通过函数可操作。
private:
void InitialGrid(void); ///< 网格的初始化
void AddGridsUpdate(int id); ///< 在网格中添加颗粒
void DeleteGridsUpdate(void); ///< 在网格中删除颗粒
void ChangeGridsUpdate(int id); ///< 改变网格中的某个颗粒中的信息
void ChangeGridsUpdate(void); ///< 全局更新背景网格
int pos_to_idx(const std:: array<int, DIM>& grid_pos) const; ///< 3d to 1d
std::array<int, DIM> idx_to_pos(int grid_idx) const; ///< 1d to 3d
void CheckPeriod(int id); ///<边界越界检查
- 网格相关处理函数,对外不可见
3.2.2.3 辅助函数与操作
public:
///< 辅助函数
void Clear(); ///< 清空所有对象
const double Density() const ;///< 计算填充率
void ExpandParticles(double scale); ///< 颗粒放大或者缩小,边界不变
void ExpandBoundary(double scale); ///<边界放大或者收缩
void EliminateOverlap(void); ///< 将重叠的packing转化为不重叠
double GetCN(std::vector<int>& cn,double error=0.02); ///< 计算配位数,输出到数组
double GetCN(double error = 0.02,std ::string filename = ""); ///< 计算配位数,输出到文件,文件名为空则不输出
void Translate(const Vector<DIM>& pos, int id); ///<颗粒平移
void Rotate(const Orientation& ori, int id); ///<颗粒旋转
void SetPosition(const Vector<DIM>& pos, int id); ///重置颗粒的位置
void SetOrientation(const Orientation& ori, int id); ///重置颗粒的方向
///< packing 生成相关函数
void push(Particle<DIM>* particle_template, int size = 1); ///< 在最后加颗粒,默认一次加一个
void pop(void); ///< 删除最后一个颗粒
void MayOverlapParticle(int id, std::vector<int>& particle_list); ///<返回可能与颗粒id相交的颗粒id列表
void MayOverlapBoundary(int id, std::vector<int>& boundary_list); ///<返回可能相交的颗边界id列表
///< 边界相关函数
Vector<DIM> RandInSTL(void); ///<在固定边界内部随机生成点
bool IsInSTL(Vector<DIM>& pos); ///< 判断点是否在固定边界的内部
bool InputSTL(std::string filename); ///<读取固定边界信息
double CalGridVolume() const; ///<计算填充空间的体积
///<信息输出
virtual void Print() const; ///< 屏幕打印信息
std::string ScrPacking(std::string filename = "",bool isfilename = false); ///< 打印SCR信息,如果isfilename为true,则将filename输出到文件名,否则输出到文件最后
void ScrParticle(int id,std::string filename = ""); ///< 打印一个颗粒的scr信息
std::string Output(std::string filename = "",bool isfilename = false); ///< 打印packing信息,如果isfilename为true,则将filename输出到文件名,否则输出到文件最后